- 关注我们
-




-
UP50飞行控制器
简介:
UP50在UP系列固定翼自动驾驶仪中是一款全数字化的自驾仪,可以让无人机具备全数字化航电系统。包含:机载飞控、地面站软件、通讯设备。它是一个集成化的系统,包含了多种传感器、GPS、通讯电台,可以控制多种布局的无人驾驶飞机,使用简单方便,控制精度高,GPS导航自动飞行功能强,并且有多种任务接口,方便用户使用任务设备。自动导航模式下,在地面站上可以随意设置飞行路线和航点,支持飞行中实时修改飞行航点和更改飞行目标点甚至更换整体航线。具备全自动起降的功能。具备地面站指点飞行模式。
遥控器:
· 使用SBUS系列遥控器接收机
· 若选配PWM转SBUS模块,此硬件兼容转接其他型号接收机。
飞控舵机控制:
· 18个SBUS舵机数字输出通道,所有舵机信号线并联入SBUS总线(电源线外部连接)与自驾仪连接,简化舵机线在无人机机体中的布线,并且相对于原有PWM信号传输线,抗干扰性(包括电台发射干扰)更强,舵机不再出现抖舵现象。
· 非SBUS舵机可选配SBUS数字信号转标准PWM信号的模块紧接在舵机端。可以通过地面站方便的设置该舵机对应的功能通道(CH1~CH18通道)、正反向输出,以及行程比例等。并联舵面舵机在需要某个舵机反向时不再需要打开舵机改电位器和电机线。
· 地面站可设置CH1~CH18反舵功能
· 捕获舵机中立位置
每架飞机的中立舵位可以在飞行中实时设置
· 舵机50Hz更新率
· 舵机电源单独供电
· 副翼转弯坡度控制
· 升降舵控制空速或者高度可选
· 油门控制高度或者空速可选
可设置自控油门位置,可以设置继电器停车位置,使得关闭发动机风门的同时启动电路停车。
· 方向舵转弯速率控制
· 襟翼控制
· 降落伞控制
· 多个多功能任务舵机
可以使用预设值控制,也可以由地面站直接控制;可以控制正射或者自稳平台;可键盘或者游戏杆控制
· 交联功能
1. 襟副翼
2. 升降舵方向舵交联,此模式可以控制V尾
3. 副翼升降舵交联,此模式可以控制飞翼或者无尾飞机
飞控功能:
· 卡尔曼滤波姿态估算50Hz
估算滚转角、俯仰角,航向角(需选配3轴电子罗盘)
· 可设置飞控安装时的偏置角
· 可设置高度计和空速计的参数
· 高度与空速保持
RPV模式下使用遥控器按命令方式控制:油门摇杆设定飞行速度,升降摇杆设定高度
UAV模式下:由设定航点的速度和高度控制
CRPV模式下:地面站设定飞行高度、速度
· 高度斜坡控制
可以在有高度差的两航点间实现斜坡高度控制
· 多达10个PID控制回路
· 内环飞行稳定控制采用50 Hz PID回路控制速率
· 所有PID回路均可在飞行中实时单独的调整
· 油门PID控制速率 5Hz
· 前馈转弯补偿提高转弯过程中的高度控制能力
· 全自动起降
· 自驾仪在飞机中可以选择24个安装方向之一
· 5种控制模式
RC模式: 遥控器直接控制模式
RPV模式:遥控器控制命令值,飞控自动稳定控制(半自主遥控模式)。油门摇杆设定飞行速度,升降摇杆设定高度,副翼摇杆控制转弯坡度,此模式可用于引导降落或者伞降
UAV模式:预设导航点全自动导航飞行
CRPV模式:游戏杆通过地面站控制飞机滚转坡度,地面站设定飞行速度、高度,飞控自动稳定控制
指点飞行模式:可以在地面站上直接点击需要飞往的位置。
· 停车控制
外置继电器可以直接控制汽油发动机立即停车,地面站在控制停车时会同时关闭风门
· 内置软件可升级
· 多任务功能,自定义的航拍拍照功能
· 多重安全保护:
GPS定位保护:如果飞机在自控UAV模式飞行过程中GPS不能定位(完全丢星),则飞机可以根据设置的情况进行直飞、原地盘旋,丢星开伞或者人工控制立即伞降。
CRPV模式通讯保护:如果在CRPV指令控制模式下超出通讯距离(或者通讯链路故障),飞机自动转换到UAV模式
遥控失灵保护:如果飞机处于RC遥控模式时,发射机信号被干扰、发射机发生故障、或飞机飞出遥控的控制范围时,飞控将自动转换到UAV自主飞行模式(需对遥控器做失效保护设置)。
电压过低报警:如果机上电压低于设定的临界值,地面站会报警,操作人员可以让飞机继续飞行,或者设置返回起飞点。
停车保护:在飞行中当发动机停车时,地面站会报警(飞机安装有转速传感器),操作人员可以设置继续滑行,或者返回起飞点,或者着陆。在停车后,如果高度足够,可以设置滑翔空速,以保证飞机以最佳滑翔比下滑。也可设置自动执行启动滑翔并回家。
全新智能开伞保护。当飞机在UAV模式下,飞行高度低于设定高度,且飞机处于连续下降模式,将会启动自动停车开伞保护功能。(停车开伞时间间隔可自行设定)
传感器:
· 5Hz高灵敏度GPS模块
· 3轴高抗震数字MEMS角速率陀螺,±300度/秒
· 3轴MEMS加速度计, ±2G
· 3轴磁罗盘(选配)
· 高精度高抗震数字传感器(精度10cm)
· 空速传感器,最大空速: 80 米/秒(可更换空速传感器得到更大的使用范围)
· 高度限制: 10000 米
· 双路霍尔转速传感器
· 温度传感器
· 可外接温湿传感器
· 可外接双GPS定向系统用于测量机头指向以及照相云台旋片修正
· 可外接多GPS导航系统(北斗定位系统、双频差分GPS等)
· 可外扩多种GPS导航系统
导航功能:
· 5 Hz GPS导航
· 到达航点自动控制多个任务舵机按预设位置动作
· 到达航点可改变飞行高度设置
· 到达航点可改变飞行速度设置
· GPS导航航点或者航线控制
控制飞机向目标航点飞行模式或者控制飞机沿航点间航线飞行模式
· 可以设置多条任务航线(每条航线可以设置999个航路点), 任务航线可以在飞行中实时切换,目标航点可飞行中实时切换。
· 用户自定义制式飞行
每个航点可以单独设置7种制式飞行模式之一。当到达航点后可以按照预先定义的制式飞行航线循环飞行;制式飞行时间可单独设置(最大2550秒,起飞航点1不受限制);制式6与制式7为标准圆飞行模式,绕中心点做环状飞行,可自行设定环绕半径。
· 导航到达目标点可自行设定
· GPS定位和定位质量
GPS定位情况实时下传,地面站监控;在定位情况不好的情况下地面站报警
· SD卡模式的存储航线组,使飞行航路点和任务不受限制
可以在飞行中实时修改航路点的设置,可重复使用飞过的航路点
每个航路点可以设置:高度,速度,航点到达半径,制式飞行方式、时间,是否沿航线飞行,是否斜坡式飞行,相机是否处于拍照状态,拍照模式(定时或者定距),拍照间隔,2个任务舵机状态,是否降落。
· 航线具备循环模式和单次航线飞行模式(通过设置1点是否具备制式飞行)
· 立即航线模式(指点飞行模式):
在UAV模式下,地图上直接点击临时需要飞往的航点,并绕航点进行制式飞行。
遥测:
· 遥测数据默认每秒一组(更换高速率电台支持5Hz遥测数据)
· 传感器数据、PID调整时数据、舵机数据均可以高速下传
· 用户数据可下传
· 遥测数据口TTL、RS232电平可选
· SD卡每秒存储10组所有传感器数据、飞行数据、舵机数据等。(飞行黑匣子功能)
· 具备SD航线存储与飞行数据黑匣子功能
任务能力:
· 多个通用IO口
· 任务舵机可实现多种的映射关系
· 具备温压湿大气数据探测能力(需选购温压湿组件)
· 可通过SPI、UART、CAN、I2C接口获取和传输任务数据
· 相机控制通道(自动航拍功能)
可以以电子快门或者舵机按照定时或者定距离自动拍照;每个航线段可以自定义拍照间隔;也可将预先设计的曝光点坐标输入自驾仪中,进行自动定点曝光。板载SD卡自动存储每张照片的照相位置、姿态等数据,POS数据的存储量不再受限制,可以用地面站软件提取照片POS数据
· 具备3轴正射平台控制能力(需选购电子罗盘)
可以控制俯仰滚转3轴舵机控制的正射平台
· 具备航向旋偏云台控制能力
· 具备机载任务云台地面站实时遥控能力(键盘或者游戏杆控制)
遥控具备直接遥控和增稳遥控模式
· 具备自动定向跟踪天线控制能力(需购买自动跟踪天线云台)
· 具备北斗等多种混合导航定位(选配相关硬件)
· 具备双GPS差分定位功能(选配相关硬件)
· 具备双GPS定向功能(选配相关硬件)
·
物理参数:
· 重量
飞控板(包含GPS接收板):37克
飞控盒(包含飞控板):162克
· 尺寸:88x51x33 mm(飞控盒),81X45X13 mm(飞控板)
使用环境:
· 温度: -25 to +60 °C
· 湿度: 5% to 95%(非结露)
电源:
· 宽输入自驾仪电源:100mA@7.2V, 输入范围 5V 至 38V.具备短时短接、反接保护。
· 自驾仪电源电压监视
· 舵机电源电压监视
通讯设备:
· 433Mhz,2400bps数传通讯设备
· 通讯距离大于25公里(地面使用全向吸盘天线,5.5dB增益)
· 可外接铱星、北斗卫星数据通信系统,做到无间断实时飞行监控
地面站:
· 全新的win8 metro风格工业仪表界面
· 地图可使用:电子地图(mapinfo格式),扫描配准地图,自定义地图
· 组合式飞行仪表
· 直观的飞行4通道舵量输出显示
· 传感器标定,磁罗盘校准
· 四点圈定范围的快速自动规划航线方式
· 可根据相机类型和重叠率参数自动计算飞行高度和航线间距
· 飞行中实时PID调节
地面站实时监控飞行数据,并动态显示数据曲线,实时修改PID增益参数
· 使用任务工程模式,取消原有的地图层管理模式,在飞行中可实时切换航线任务,切换目标航点
· 可以实时操作任务舵机位置,操作和显示任务IO口
· CRPV模式下远程控制飞机飞行(支持游戏杆或者遥控器操纵)
· 图形化方便灵活的航点编辑方式(包括制式航线)
可以直接在地图上使用鼠标增加、删除航点,可以直接拖动编辑所选择的批量航点,可以手动修改航点数据。支持单点和所有航点上传和下载。
· 自动根据设定航带宽度和航线长度生成航拍耕地航线(具备对准航点和拍照航点设计模式)
· 调整舵机旋转方向和中立值
· 记录遥测数据
· 遥测数据包含更多信息(包含目标航点位置)
· 显示飞机的飞行轨迹
· 危险告警(电压、温度、GPS状况、发动机转速、高度、爬升率等)
· 显示飞行时间、飞行里程、剩余飞行里程,预计剩余飞行时间
· 回放飞行数据或SD卡高速的记录数据
· 安装设置向导可以快速完成必要的设置,迅速达到自动驾驶状态。
· 每个航线段拍照可以按照定时和定距进行选择
· 统一批量化修改航点表参数
· 地面站快速提取SD卡记录的照片POS数据
· 地面站回放照片数据位置
· 自定义规划飞行制式
· 遥控器输入数据、舵机输出数据显示与反向舵机设置
· 云台舵机自控与手控设置
· 设定制式6和制式7时的盘旋飞行半径
· 已拍照数量的实时显示
· 可以下载保存飞机配置信息,同一飞控在不同飞机间更换,只需上传恢复原下载的配置数据即可
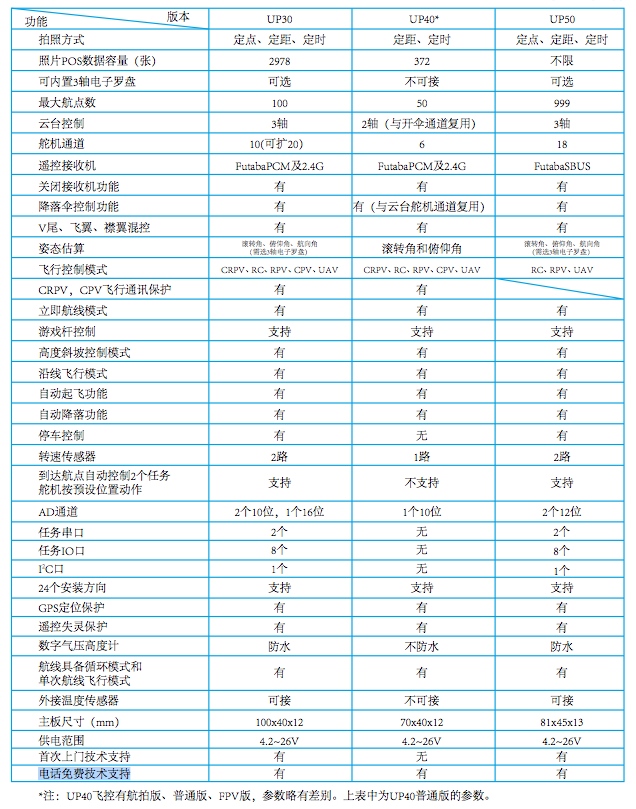
附:UP50相对于UP30改进功能
硬件方面
1.更换带管理功能电源模块,防反接保护,输出电压稳定,输入电压宽度大。
2.更换新型数字陀螺,测量响应及时,输出频率快精度高,数字输出
3.更换高精度气压高度计,精度到10厘米
4.更换新型号GPS模块,定位快稳定性强
5.更换高性能单片CPU计算处理速度更快
6.SBUS舵机信号输入输出,数字化航电系统,简化接口设计,提高抗干扰能力
7.增加了TF卡,多条航线可以直接存储在TF卡,地面站随时调取,并且实时高速记录飞控各项数据资料,照片POS点数据也直接记录在TF卡。
8.预留丰富的接口,如CAN、I2C、SPI、UART等数字接口以及PWM、IO口等。
9.可选配高速电台,高速下传飞控数据。
10.采用新军标航空接插件,连接更牢固,接触更紧密,可靠性更高。
11.体积更小,重量更轻
软件方面
A:飞控软件
1. 新优化姿态算法,飞机可以在三维空间自由运动,姿态计算更佳。
2. SBUS舵机模块通过飞控设置通道、正反向、行程比例。
3. 可以下载保存飞机配置信息,同一飞控在不同飞机间更换,只需上传恢复原下载的配置数据即可。
4.从30Hz提高至50Hz姿态更新及PID控制。
5.云台新修正算法,响应快位置更准确。
6.智能开伞保护,无需空速参与,保护更强。
7.每个航点单独设置等时等距拍照方式以及拍照间隔。
8.突破原来一个任务航线只能有100个航点限制,单条航线最高可有999个航点,并且可以同时装载多条航线。
9.自动到达半径,自动导航PID
10.预留接口,可连接北斗导航系统进行混合导航
12.预留接口,可连接双GPS定向
13.预留接口,可连接差分GPS系统
B:地面站软件
1、地面站使用全新win8 metro风格的工业仿真界面
2、可地面站存储飞机参数,导出当前飞机参数到地面站,校验飞机参数,上传保存的飞机参数到飞控
3、设置SBUS舵机执行的相应通道号
4、扩展舵机数据分为遥控接收机数据和飞控输出舵机数据
5、使用任务工程模式,取消原有的地图层管理模式,在飞行中可实时切换航线任务
6、SD卡进行飞行数据的高速记录,所记录的飞行数据可在地面站进行回放,
7、照片数据的POS点保存到SD卡,POS点个数不受限制
8、POS点信息使用地面站提取SD卡记录方式,不需要电台或直连线方式多次传送照片点数据
9、航点的拍照方式可以单独设置为定时或定距模式
10、可设定航拍使用的相机和叠片率从而自动计算飞行高度和航间距,SD卡航线与地面站航线进行同步和检测一致性
11、PID通道可进行混合数据显示
12、航点数据编辑表单屏显示航点个数更多,并且支持统一修改航点数据

配置参数