- 关注我们
-




-

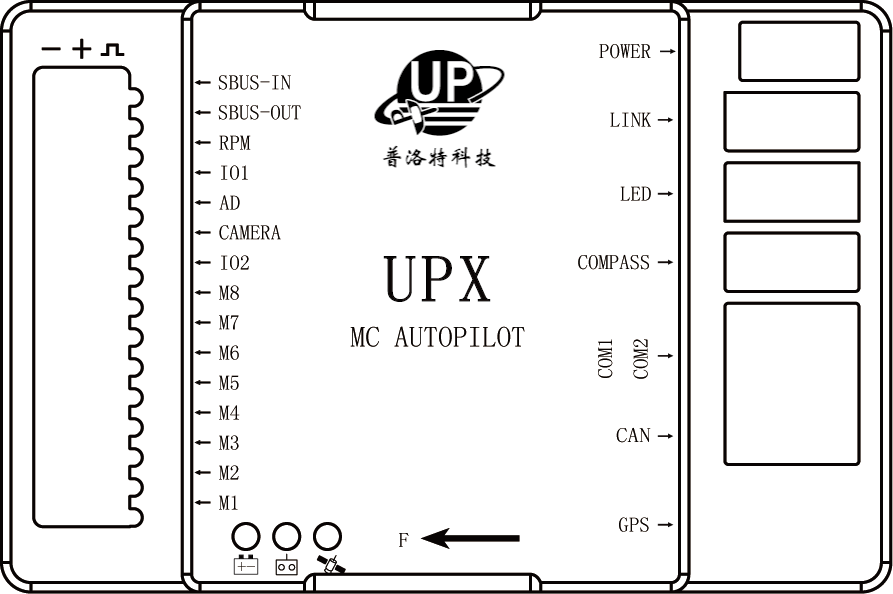
UPX多旋翼自驾仪
简介
UPX自动驾驶仪是普洛特专为多旋翼无人机研发生产的一款飞行控制器。UPX自驾仪分为航拍版和植保版两个版本,可控制十字型、X型及4、6、8等多轴飞行器,具有体积小,重量轻,集成度高,多任务接口等优点。使用简单方便,控制精度高,GPS导航自动飞行功能强。真正做到不用遥控器,直接使用地面站控制全自动起飞、执行预设航线任务或者指点飞行,回家自动降落。
飞控功能
全自动起降:无需遥控器,手机操控,一键起飞、降落
六种控制模式:RC模式、RPV模式、指点飞行模式、UAV模式、CRPV模式、热点环绕模式
500个飞行航路点:可在飞行过程中实时修改航路点的设置
多重安全保护:GPS定位保护、CRPV模式通讯保护、遥控失灵保护、电压自动检测保护等
高度斜坡控制:可以在有高度差的两航点间实现斜坡高度控制
热点环绕飞行模式:飞行器可实现360环绕飞行,机头始终指向环绕中心点。环绕热点可手工输入、地图指点或选择飞行器当前位置,同时可以设置环绕速度和环绕方向
立即航线模式(指点飞行模式):在UAV模式下,地图上直接点击需要飞往的航点,到达航点后机头指向设定方向。
任务能力
相机控制通道(自动航拍功能):在任务航线段,可以控制电子快门按照定时或者定距离自动拍照,支持低电平触发或者继电器控制快门
具备2轴正射平台控制能力:地面站可以控制俯仰滚转2轴舵机控制的正射平台
板载TF卡数据存储器:每秒10次存储所有飞行数据、传感器数据、遥控器数据、任务数据及每张照片的POS数据
支持其他任务载荷定制能力
一体化集成地面站

多种地图可选:可使用高德地图、google地图或者卫星地图显示飞行姿态、飞行轨迹、预设航线等
传感器标定:可进行传感器标定及磁罗盘校准
可扩展.差分:支持差分基站和千寻差分
飞行中实时PID调节:地面站实时监控飞行数据,并动态显示数据曲线,可实时修改PID增益参数
图形化的航点编辑方式:可直接在地图上使用鼠标增加、删除航点,可直接拖动编辑所选择的批量航点,可手动修改航点数据,支持单点和所有航点的上传和下载,可通过文件导入飞行航点数据
自动生成航线及拍照间隔:根据设定的任意多边形边界点、航带宽度生成航拍耕地航线,自动根据设定相机参数和相片重叠度计算航线间隔及拍照间隔
可设置大面积作业区域:自动智能分区航线,自动计算作业面积,预计作业时间。航线具备循环模式和单次飞行模式
CRPV模式下远程控制飞行(支持游戏杆或者遥控器操纵)
危险告警(电压、温度、GPS状况等)
自动计算作业面积和预计作业时间
回放飞行数据
配置参数
项目 | UPX | |
技术指标 | 定位方式 | 普通GPS(可外接差分) |
悬停控制精度 | 垂直方向0.5m 水平方向1.5m | |
差分定位精度(选配) | 垂直方向0.02m 水平方向0.01m | |
最大抗风能力 | <=10m/s | |
最大倾斜角 | 30° | |
航点数量 | 100个 | |
POS点存储 | 内存卡(可扩展) | |
物理特性 | 尺寸 | 75.3×50×22mm |
重量 | 92g | |
工作温度 | -30~+60℃ | |